
Bearing Condition Monitoring System for electrical machines
Functional description
Online monitoring of bearing conditions is based on measurement of electric potential differences generated by friction between a shaft and a bearing or inside a bearing (i.e. ball bearing). The main parts of the system are the Slip Ring Transmitter, the Evaluator and optional the specially designed Data_Logger software.
Slip Ring Transmitter (SRT)
The Slip Ring Transmitter (SRT) contains a special slip ring with redundant carbon brushes which receives the electric potential difference signal from the shaft-bearing system. The SRT is also equipped with an incremental encoder to bring the measured signal in relation to the rotation of the crankshaft. It is mounted to the machine shaft with an specific adapter. The construction is designed to withstand vibration.
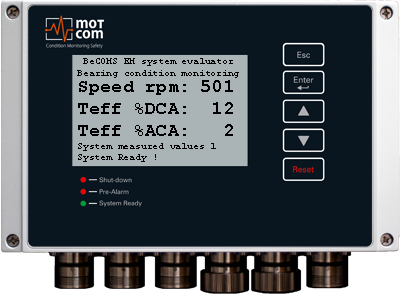
Evaluator
The Evaluator is designed to withstand the environment in Industries. Its vibration resistance allows an installation near the machine without any special support. The Evaluator consists of a alloy case, a liquid crystal display (LCD), three LEDs indicating the system status and five membrane buttons for user interaction. A powerful micro controler inside the Evaluator analyzes the measured data continously, displays the data on the LCD and triggers the alarm relays in case of thermo voltage. The bargraph display makes recognizing the current measurement data easy.
Data_Logger Software
The Data_Logger software can receive measurement data of up to six connected BeCOMS EM systems simultaneously. It is used to display and store the data for later analyzation.The Data_Log software supports the localization of wow and flutter. This is done by additionally analysing the signal against the position of the incremental encoder inside the SRT. The result is the “Polar Diagram” of the Data_Log software. It shows the measured signal over the engine rotation and the angle acceleration of the shaft.
Examples of measured starts (asynchronous motor with functional ball bearing)
Examples of measured starts (asynchronous motor with damaged ball bearing)
One ball partly flattened
The outer ring has been milled at one position
Click here to see a BeCOMS EM demonstration video
products
BeCOMS® EM
